
Marr-Hildreth operator


The Marr-Hildreth operator or Laplacian of Gaussian (LoG) is a special form of a discrete Laplace filter and is used, for example, in image processing to detect edges. The filter kernel is created by applying the Laplace operator to a Gaussian function . Because its shape is similar to that of a Mexican sombrero , it is also known as a Mexican hat or sombrero filter . The LoG is an isotropic measure of the second derivative of an image. That is why he detects places of great change. In an image, these are straight edges of objects where the intensity changes quickly. It is therefore a filter that can be used for edge detection .
The name Marr-Hildreth-Operator goes back to David Marr and Ellen Catherine Hildreth .
Generation of the kernel
The starting point for generating the filter kernel is the Gaussian function in 2D:
- .

If you apply the Laplace operator to the Gaussian function, you get the continuous representation of the LoG :
- .

- .

In order to use this function in image processing , the continuous LoG is discretely approximated. The approximation should be carried out for kernels with an odd edge length , with the origin of the kernel in the middle - i.e. at . A pixel-sized sample kernel, i.e. a discrete approximation of the continuous LoG with a standard deviation of , could look like this:





The kernel was first normalized to 1 and then multiplied by 255 (highest color value of an 8-bit gray value image). The form of the LoG can be clearly seen in the matrix entries. Now it can be applied to an image by folding it to clarify the edges:

Here denotes the convolution operation , the input image and the image with the verdeutlichten edges. The LoG is basically no edges but areas with rapid changes (see the first graph in the article about the Laplace filter ). The second derivative gives a negative value on one side of the actual edge and a positive value on the other side. The edge lies at the zero crossing between these values.



Alternative uses
Instead of a single convolution operation with a LoG convolution kernel, you can first apply the Laplacian filter to the input image and then fold the result with the Gaussian function (i.e. soften it), or vice versa. In this case, care must be taken that the intermediate result is saved correctly (32 bit floating point) so that there are no undesirable overflow or rounding problems.
An approximation of the LoG filter can be obtained by a difference of 2 Gaussian kernels with different variances. This method is called the difference of Gaussian .
The disadvantage of the LoG is that the convolution masks become very large for high values (40 pixels at ) and compute accordingly more slowly. Furthermore, the chance of detecting false edges from local fluctuations is higher than with newer methods (e.g. Canny ) and the filter can have problems with round edges.


Pictorial work
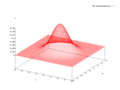
Gaussian function in 2D

LoG, d. H. the Laplace operator applied to a Gaussian function in 2D.

Example image for the application of the LoG

Amount of all negative values normalized to 255 after applying the LoG

Positive values normalized to 255 after applying the LoG

Sum of the amount of all negative and positive values. The actual edges in the image appear as black lines between the bright negative and positive values.

Total image as negative for better visibility of the result







literature
- B. Jähne: Digital image processing . Springer, 2002
- R. Haralick and L. Shapiro: Computer and Robot Vision . Volume 1. Addison-Wesley Publishing Company, 1992
- D. Marr: Vision . Freeman, 1982
Web links
- CVonline: Marr-Hildreth, Laplacian of Gaussian, Zero-Crossing, Difference of Gaussian Edge Detector
- http://cs.wellesley.edu/~cs/vitae.pdf Biography and list of publications EC Hildreth (PDF file; 187 kB)
Individual evidence
- ↑ David Marr, Ellen Catherine Hildreth: Theory of Edge Detection . In Proceedings of the Royal Society of London . B 207, 1980, pp. 187-217.
- ↑ http://homepages.inf.ed.ac.uk/rbf/HIPR2/log.htm