
Kovalevskaya roundabout
The Kovalevskaya gyroscope is one of the three types of gyroscopes in gyro theory whose equations of motion can be solved analytically under any initial conditions. It is a heavy symmetrical top , whose three principal moments of inertia A, B and C satisfy the condition A = B = 2C, and is located its center of mass in the plane of the to A and B belonging to major axes is spanned.
Sofja Wassiljewna Kowalewskaja announced the discovery of the top in 1888 in an award-winning work on the rotation of a rigid body around a fixed point and also the solution of the Euler-Poisson equations . For the representation of the solution functions, Kovalevskaya needed about 50 pages, which underlines the complexity of the movement possibilities of the top. The simplification of the solution and the classification of the movement modes is so complex that it kept science busy into the 21st century.
The Kowalewskaja constant K = k ² vanishes for Staude rotations , see the animations in Fig. 3 and 4 . The bifurcation diagram of the Kovalevskaya gyroscope is interspersed with separatrices that separate phases where similar, topologically related types of movement occur, see Fig. 5 . A typical movement of the Kovalevskaya gyroscope shows trajectories in the fixed space of the angular momentum, which run around an annular tube and fill it tightly, see Fig. 6a-d . The separations are the phase boundaries in whose centers there is an unstable periodic orbit. In almost all phases the gyro passes through areas of stable and unstable behavior. This fact can with Fomenko - graphs are outlined, see Fig. 7 . Poincaré sections are another way to illustrate the behavior by coloring the stable areas, like in a map, at the borders of which the separating matrices are, see Fig. 8 .
The Kovalevskaya gyroscope is important for gyroscopic theory and can be used to model certain phenomena in stationary flows of incompressible liquids; however, there is no technical application at the beginning of the 21st century.
Realizations

Fig. 1: Realization according to Schwarz

Fig. 2: Realization according to Richter


The ellipsoid of inertia of the Kovalevskaya gyroscope is rotationally symmetrical, but the center of mass is not on the axis of symmetry . This is only possible with an inhomogeneous mass distribution. A construction with two cylinders goes back to Hermann Schwarz and PH Richter used the shape with a circular ring and three mass points, which was also used in the animations below. In Figures 1 and 2, s denotes the center of mass and the coordinate system the support point.
phenomenology
Carousel movements

Fig. 3: Stable carousel movement

Fig. 4: Unstable carousel movement


The carousel movements are Staude rotations of the Kovalevskaya gyro, in which the gyro rotates around a vertical axis which does not coincide with any of the main axes of inertia. In Fig. 3 he does this in a stable manner and in Fig. 4 the center of gravity is too high and the carousel movement becomes unstable. In both animations, the angle of inclination between the 1-axis and the plumb line was increased by 0.01 rad compared to the initial target value, which remains unnoticed in Fig. 3, but in Fig. 4 leads to the periodic breaking of the top.
Carousel movements arise under the conditions
- n 2 = q = p² + cn 1 = k = 0.
see # equilibrium solutions .
Bifurcation diagram of the Kovalevskaya gyro

The bifurcation diagram in Fig. 5 gives an impression of the complexity of the behavior of the Kovalevskaya gyro . Bifurcation (branching) is the phenomenon that a system can branch into different states at a critical point. A vertically standing rod can fall over to the left or right in the event of a small disturbance if it is somehow bound to a plane. The dividing line between the two paths is a separatrix , one of which also exists in the asymmetrical Euler top . The movements along the separating dies are often unstable.
The critical points in the Kovalevskaya gyroscope appear at certain values of the total energy h and the vertical angular momentum l . The bifurcation diagram is divided into five areas by the # equilibrium solutions, with unphysical parameter combinations in the white area O which are forbidden to the top. The colored areas are accessible to the top and it shows topologically similar behavior in the red, yellow, blue and gray areas.
The left edge a – b defines the vertically hanging top, the movement of which is always stable, and the line d – e the vertically upright top, whose movement is always unstable. The carousel movements that take place on the uvw line and are stable on the u – v line and unstable in the v – w range are characteristic of the Kovalevskaya roundabout, see Fig. 3 and 4 . The periodic orbits that the gyro tracks at the minimum or maximum value of the Kovalevskaya constant branch along the lines additionally drawn, see Fig. 7 .
Bifurcations take place on the lines drawn in the bifurcation diagram:
- A – F, C – D, G – H: bifurcation of the energy surface
- A – B, F – G: elliptical pitchfork bifurcation
- D – E: hyperbolic pitchfork bifurcation
- B-C, B-J: tangent bifurcation
- E – H: hyperbolic period doubling bifurcation
In the areas in between, the energy surfaces are uniformly scrolled .
| Analytical form of the bifurcation diagram | |||
| The table gives the analytical representations of the phase boundaries in Fig. 5 for c = 1. | |||
| Bifurcation | presentation | Kovalevskaya constant |
Domain of definition |
|---|---|---|---|
| from | l = 2p, h = p 2 - 1 | k 2 = (p 2 + 1) 2 | p> 0 |
| d – e | l = -2p, h = p 2 + 1 | k 2 = (p 2 - 1) 2 | p> 0 |
| u – v | l = -p 3 - p –1 , h = 3 ⁄ 2 p 2 + 1 ⁄ 2 p –2 | k 2 = 0 | 0 <p <3 -0.25 |
| v – w | l = -p 3 - p –1 , h = 3 ⁄ 2 p 2 + 1 ⁄ 2 p –2 | k 2 = 0 | 3 -0.25 <p <1 |
| B-C, B-J | l 2 = 16 ⁄ 27 h 3 | k 2 = 1 - h 2 /3 | 0 <h <√3 |
| A-B, F-G | l 2 = 2h | k 2 = 0 | h> 0 |
| ED, E-H | l 2 = h ± √ (h 2 - 2) | k 2 = l -4 | h> √2 |
Families of the same tori
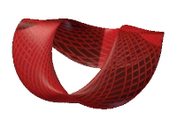
Fig. 6a: Trajectories (lines forming a network) and torus (shaded brown) in angular momentum space.
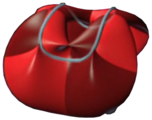
Fig. 6b: Separatrix with an unstable periodic orbit (gray) in the center

Fig. 6c: Other side of the same separatrix with two mutually symmetrical tori (green).

Fig. 6d: Tori with a smaller Kovalevskaya constant change into stable periodic orbits (gray).




For a given movement of the Kovalevskaya gyro, the total energy, the angular momentum in the vertical direction and the Kovalevskaya constant are invariable. Because the Kovalevskaya gyroscope represents an integrable system, the angular momentum moves in the main axis system fixed to the body on a ring-shaped tube or torus and the trajectories fill this tightly, see Fig. 6a. The torus can penetrate itself, the outside is tinted lighter than the inside. With the same total energy and the same angular momentum in the vertical direction, the tori change steadily with the Kovalevskaya constant and form a family, which the coloring is supposed to indicate. At a branch point, the tori pass into other families. The branch point is a separatrix that is common to these adjacent tori families, Figs. 6b and c. In the case shown from area B, one red and two symmetrical green tori meet in the separatrix. In the center of the separatrix lies an unstable periodic orbit, which the gyro leaves with the slightest disturbance along the separatrix, branching into one of the neighboring tori. If the Kovalevskaya constant increases or decreases, the gyro can hit another branch point, or at an extreme value of the constant it can end in a stable periodic orbit, like the gray one in Fig. 6d. With increasing Kovalevskaya constant, the top always passes through stable orbits in the same way in areas A to J, between which there are separate matrices. This can be symbolized with Fomenko graphs.
Fomenko graph

The sequence of bifurcations with increasing Kowalewskaja constant can be in Fomenko - graphs representing respectively a nature in the areas A to J identical. Stable movements take place in the free ends of the branches of the graph. Where branches of different colors meet, a bifurcation takes place along separate matrices. The different colors group types of movements. For example, carousel-like movements take place along the purple branches.
Poincaré cuts

The Poincaré cuts give a clear impression , see Fig. 8. A trajectory densely fills a ring-shaped tube, a torus , in the phase space of the angular momentum . The tori are characterized by the Kovalevskaya constant k . At a critical value of k, the tori degenerate into a separatrix, which corresponds to an unstable periodic orbit.
The trajectories of the top are intersected with a sphere, the surface of this sphere is colored according to the family of intersected tori and projected into the plane. The colors correspond to the families of the tori and the brightness increases with k . The stable orbits are the light and dark centers of the surfaces. The surfaces are separated by separate matrices on which clear color changes occur. The intersections of separatrices are unstable periodic orbits.
A bifurcation of the energy surface takes place between D and C and the yellow area disappears. Between C and B, blue disappears in a tangent bifurcation . Between B and A, green disappears in a pitchfork bifurcation .
Solution of the equations of motion
Euler-Poisson equations
For reasons of symmetry, the first main axis of inertia belonging to A can be chosen so that the center of mass of the top lies on it. This specializes in the Euler-Poisson equations for the Kowalewskaja gyro

Here p, q, r = ω 1,2,3 stand for the angular velocities, the vector for the direction of the weight of the top, expressed in the co-rotating main axis system, to which the indices 1,2,3 relate. The parameter


consists of the mass m , the gravitational acceleration g , the distance s 1 of the center of mass from the support point and the main moment of inertia A around the 1-axis or C around the 3-axis. The constant c quantifies the effect of the weight on the top and with c = 0 a symmetrical, force-free Euler top is created .
Scaling the time with and the angular velocities with result in equations of motion with c = 1, so that they no longer have any free parameters. Mathematically, it is enough to examine just this one case. Kovalevskaya scaled the lengths so that A = 2 C = 2.


Integrals of motion

As with every heavy top, the norm of the direction vector of the weight force, the angular momentum in the perpendicular direction and the total energy E are constant:

These constants are called integrals in gyro theory , the first two also Casimir invariants . In analytical mechanics , the total energy is also referred to as the Hamilton function , which is why it is named with h . The Kovalevskaya gyroscope has a fourth rational integral, the Kovalevskaya constant

which is never negative and only depends on the angular speeds and components of the weight force in the 1-2 plane. In the pqr space of the angular velocities around the main axes, this constant defines a cylindrical surface with a constant cross section in the r direction. Because of K (p, q) = K (-p, -q) , the surface is also symmetrical, see Fig. 9. If cn 1 is negative , p and q swap roles and there are mirrored figures on a diagonal. Kovalevskaya used k ² as a term, but it is also K common.
Equilibrium solutions
Relative equilibria are fixed points in the gyroscopic equations that occur when these quantities are constant :

- 0 = qr
- 0 = - rp - cn 3
- 0 = cn 2
- 0 = rn 2 - qn 3
- 0 = pn 3 - rn 1
- 0 = qn 1 - pn 2
This immediately follows n 2 = 0 and with qr = 0 two cases have to be distinguished:
- Case 1, r = 0
- From r = 0 follows n 3 = n 2 = 0, i.e. n 1 = ± 1, and therefore ultimately also q = 0. This case corresponds to the vertically hanging or upright top, which is shown on the lines in the bifurcation diagram in Fig. 5 a – b or d – e finds again. The former movement is stable, the latter unstable. The Kowalewskaja constant reads here k² = (p² ± c) ² , the angular momentum square l ² = 4 p ² and depending on whether l ² <4c or l ²> 4c the type of instability differs. The areas are separated in Fig. 5 by point w, where a carousel movement with k = 0 takes place.
- Case 2, q = 0
- In the second case, q = 0, rp = - cn 3 and from the penultimate Euler-Poisson equation p ² + cn 1 = 0. In this case, therefore, the Kowalewskaja constant k vanishes and n 1 <0, so that the top is upright with the center of mass above the support point. These movements define the so-called carousel movements of the gyro and can be found in the bifurcation diagram in Fig. 5 on the route and much more.
Lagrange and Hamilton functions of the Kovalevskaya gyro
The theoretical treatment of the Kovalevskaya gyro is done with the Hamilton function , which is equal to the total energy of the gyro. One possible formulation uses the local angular momentum components L 1,2,3 and the direction vector of the plumb line

With

When using the Euler angles ψ, ϑ and φ this is written

see reference systems and Euler angles in gyro theory . Are in it
![{\ displaystyle {\ begin {aligned} p _ {\ psi} = & {\ frac {\ partial {\ mathcal {L}}} {\ partial {\ dot {\ psi}}}} = {\ dot {\ psi }} [1+ \ sin (\ vartheta) ^ {2}] + {\ dot {\ varphi}} \ cos (\ vartheta) = {\ frac {L_ {z}} {C}} = {\ text { const.}} \\ p _ {\ vartheta} = & {\ frac {\ partial {\ mathcal {L}}} {\ partial {\ dot {\ vartheta}}}} = 2 {\ dot {\ vartheta}} \\ p _ {\ varphi} = & {\ frac {\ partial {\ mathcal {L}}} {\ partial {\ dot {\ varphi}}}} = {\ dot {\ psi}} \ cos (\ vartheta ) + {\ dot {\ varphi}} \ end {aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ae7ae44b70620cc6e717a4fba016c441c66166c4)
the conjugate impulses to the angles and
![{\ displaystyle {\ mathcal {L}} = {\ frac {{\ dot {\ psi}} ^ {2}} {2}} [1+ \ sin (\ vartheta) ^ {2}] + {\ dot {\ psi}} {\ dot {\ varphi}} \ cos (\ vartheta) + {\ frac {{\ dot {\ varphi}} ^ {2}} {2}} + {\ dot {\ vartheta}} ^ {2} + c \ sin (\ vartheta) \ sin (\ varphi)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e5e592701361429d91214e9e0c26e08f18112ad0)
the Lagrange function of the top.
Kovalevskaya's elaboration
Sofia Kovalevskaja succeeded in representing all the necessary variables except for the precession angle ψ as hyperelliptic functions of the first kind, both of which arguments are linearly dependent on time. To do this, she used variables s 1,2 , which to a certain extent replace the angular velocities p and q . She proceeded as follows.
The angular velocities p and q as well as the directional components n 1,2 are combined with the imaginary unit i to form a complex quantity :

With the # Euler-Poisson equations , the time derivatives

can be formed from which n 3 can be eliminated :

Ln stands for the natural logarithm . The same procedure leading to the complex conjugate sizes to and the sum of providing the real, non-negative integral



With the variables x 1,2 Kowalewskaja could also express r , n 3 and ξ 1,2 .
Kowalewskaja represented the time derivatives with new variables s 1,2 , the zeros of the function of the 2nd degree

in s are where the coefficients

Are polynomials in x 1,2 and l 1 = h / 3. The time derivatives are calculated for the zeros s 1,2

or equivalent

In it is

a 5th degree polynomial in s and

are constants of motion. The first factor in the polynomial R 5 is directly related to the Weierstrass ℘ function . The connection of the differentials d s 1,2 implies that s 1,2 can be expressed as quotients of theta functions whose arguments are linear functions of time.
That solves the problem in principle. On another 50 pages, Kovalevskaya showed how all variables can be represented with hyperelliptic functions and how any initial conditions can be taken into account with them. Matter is so complicated that it took science over a century to study these solutions and work out their properties.
See also
The other two gyro types, which can always be integrated under any initial conditions
- the force-free Euler gyro
- the heavy symmetrical Lagrange top
or the
- Goryachev Tschaplygin roundabout , which is a modification of the Kovalevskaya roundabout.
Footnotes
-
↑ a b The article
Sophie Kowalevski: Sur le probleme de la rotation d'un corps solide autour d'un point fixe . In: Acta Mathematica . Volume 12, 1889, pp. 177-232 . ( projecteuclid.org [accessed March 21, 2018]). and Sophie Kowalevski: Sur une propriété du système d'équations différentielles qui définit la rotation d'un corps solide autour d'un point fixe . In: Acta Mathematica . Volume 14, 1890, pp.
81-93 ( projecteuclid.org [accessed March 21, 2018]). contain the works that were awarded the Bordin Prize on December 25, 1888.
-
↑ see AM Permelov: Kovalevskaya Top: An Elementary Approach . In: Journal of Applied Mathematics and Physics . Vol. 131, Issue 2, 2002, pp. 612–620 , arxiv : math-ph / 0111025v1 (Permelov simplifies the motion functions to such an extent that they only take up a few pages.). and
Fawzy Mohamed Fahmy El-Sabaa, Alshimaa Abdelbasit Mohamed, Salma Khalel Zakria: The Qualitative and Quantitative Methods of Kovalevskys Case . In: Journal of Applied Mathematics and Physics . Vol. 5, Issue 9, September 2017, ISSN 2327-4379 , doi : 10.4236 / jamp.2017.59155 ( scirp.org [accessed on March 23, 2018] Study of the phase portrait, the singular points and the bifurcation diagram.).
- ↑ Tuschmann and Hawig (1993), p. 124.
- ↑ Magnus (1971), p. 126.
- ↑ Audin (2008), p. 99.
- ^ Richter, Dullin and Wittek (1997), p. 36f.
- ^ Richter, Dullin and Wittek (1997), p. 11ff.
- ^ Richter, Dullin and Wittek (1997), p. 56f.
- ^ Richter, Dullin and Wittek (1997), pp. 25f.
- ^ Richter, Dullin and Wittek (1997), p. 22f.
- ↑ Magnus (1971), p. 126, Richter, Dullin and Wittek (1997), p. 12.
- ^ Richter, Dullin and Wittek (1997), p. 36.
- ↑ Kovalevskaya (1888), p. 184.
- ^ Richter, Dullin and Wittek (1997), p. 10.
- ^ Richter, Dullin and Wittek (1997), p. 11f.
- ↑ Richter, Dullin and Wittek (1997), p. 36. There, however, the names of the angles ψ and φ are reversed compared to the one used here.
- ↑ Leimanis (1965), p. 39.
- ↑ Kowalewskaja used the designation R 1 ( s ) instead of R 5 ( s ). The positive sign is not always correct for the roots. If the sign is adjusted accordingly, the equations are correct.
- ↑ Tuschmann and Hawig (1993), p. 129.
- ↑ see, for example, Permelov (2002) and Richter, Dullin and Wittek (1997).
literature
- Wilderich Tuschmann, Peter Hawig: Sofia Kowalewskaja . A life dedicated to math and emancipation. Birkhäuser Verlag, Basel 1993, ISBN 978-3-0348-5721-5 , doi : 10.1007 / 978-3-0348-5720-8 ( limited preview in Google book search [accessed May 25, 2017]).
- K. Magnus : Kreisel: Theory and Applications . Springer, 1971, ISBN 978-3-642-52163-8 , pp. 126 ff . ( Limited preview in Google Book Search [accessed February 20, 2018]).
-
Peter H. Richter , Holger R. Dullin, Andreas Wittek: Kowalewskaja Kreisel. Institute for Scientific Film (IWF) , 1997, accessed on April 7, 2018 (The dynamics of the Kowalewskaja Kreisel is shown in a film on several levels of abstraction in illustrated animations and images.). The written draft of the film:Peter H. Richter, Holger R. Dullin, Andreas Wittek: Kovalevskaya Top . Ed .: Institute for Scientific Film (IWF) . 1997, ISSN 0073-8433 (English, researchgate.net [accessed March 28, 2018]).
- Michèle Audin: Remembering Sofya Kovalevskaya . Springer Verlag, London a. a. 2008, ISBN 978-0-85729-928-4 , pp. 89 ff ., doi : 10.1007 / 978-0-85729-929-1 (English, limited preview in the Google book search).
- Eugene Leimanis: The General Problem of the Motion of Coupled Rigid Bodies about a Fixed Point . Springer Verlag, Berlin, Heidelberg 1965, ISBN 978-3-642-88414-6 , doi : 10.1007 / 978-3-642-88412-2 (English, limited preview in Google book search [accessed on March 21, 2018] ).