In mathematics, an intersection point is a common point between two curves in a plane or in space. In general usage, the point of intersection is that of two straight lines , which is, however, contained in the mathematical term “curve”. In space there is also the intersection of a curve with a surface . In the simplest case, a straight line intersects a plane.
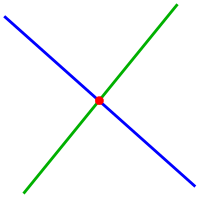
Intersection of two straight lines
The determination of a point of intersection is easy in both cases of straight line and straight line (see below). In general, the determination of points of intersection leads to non-linear equations that can be solved in practice using a Newton method . Intersections of a straight line with a conic section (circle, hyperbola, ellipse, parabola) or a quadric (sphere, ellipsoid, hyperboloid, ...) lead to quadratic equations and are relatively easy to solve. For the intersection of a straight line with a plane / sphere / cylinder / cone, the representational geometry offers methods to determine points of intersection graphically .
Intersection in the plane
Intersection of two straight lines
For the intersection of two non-parallel
- Straight lines (given in coordinate form )

results from Cramer's rule for the coordinates of the point of intersection

If is, the two straight lines are parallel.

- For a straight line through the points
-
 and
and 
- and a straight line through the points
-
 and
and 
- The point of intersection is calculated by converting the two-point forms into coordinate forms beforehand.
- The intersection results in


- and

Intersection of two lines
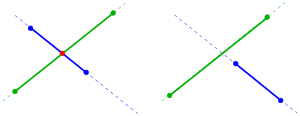
Intersection of two lines
If two non-parallel lines and are given, they do not have to intersect. Because the intersection of the associated straight line does not have to be included in both segments. To clarify the latter, both routes are represented parameterized:



-
 ,
,

If the lines intersect, the common point of the associated straight line must have parameters with the property . The cutting parameters are the solution of the linear system of equations




This is solved (as above) with Cramer's rule, the intersection condition is checked and or is inserted into the associated parameter representation in order to finally obtain the intersection point .



Example: For the distances and the system of equations is obtained




and . I.e. the lines intersect and the intersection is .


Note: If you consider straight lines through two pairs of points (not segments!), You can ignore the condition and obtain the intersection of the two straight lines with this method (see previous section).
Section of a straight line
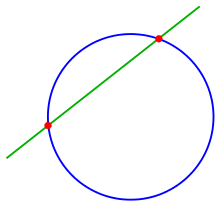
Intersections of a straight line with a circle
To cut the
- Straight with the circle


the system is first shifted by setting and so that the center of the circle is at the zero point. This results in a new circular equation



and as a new straight line equation
-
 with .
with .
By solving the straight line equation according to or , inserting it into the circular equation, applying the solution formula for quadratic equations and then undoing the shift, the intersection points are obtained with



if applicable. In the case of equality, there is only one point of intersection and the straight line is a tangent to the circle.

Note: The intersection points of a straight line with a parabola or a hyperbola can be determined analogously by solving a quadratic equation.
Intersection of two circles
Determining the intersection of two circles

the problem of intersections of the straight line ( power line )
can be solved by subtracting the two equations

lead back with one of the two circles (see above).

Intersection of two circles, centers on the x-axis, power line dark red
Special case :
In this case the first circle has the zero point as the center and the second center is on the x-axis. This simplifies the equation of the power line and results
for the intersection points


If there is, the circles do not intersect. In the case , the circles touch.


The general case can always be reduced to this special case by a suitable shift and rotation.
Alternative calculation method
Analogous to the circle equations above , the center points of the circles can be described as follows:

Intersection of two circles

The designations can be found in the adjacent graphic. Furthermore, the vector and can be described as follows:




(Note: represents the vector norm or the length of the vector)
Where represent the radii of the circles. So this vector connects the points and . This formula is arrived at through geometrical considerations. With the triangles in the graphic, the following equation must be fulfilled according to the Pythagorean Theorem .




Furthermore, the sum of the lengths of and the distance between the centers of the circles corresponds to:

As a result, the center-to-center distance can be divided into the lengths of and as a percentage with the parameter :


With the equations (1) and (2) the parameter can be determined:

Now we need a unit vector orthogonal to the direction vector between and . This can then be represented as follows:


The intersections can now be described as follows:


Intersections of two conic sections
The task of determining the points of intersection of an ellipse / hyperbola / parabola with an ellipse / hyperbola / parabola generally leads to an equation of the fourth degree when a coordinate is eliminated , which can only be easily solved in special cases. The intersection points can, however, also be determined iteratively with the help of the 1- or 2-dimensional Newton method , depending on whether a) both conic sections are implicitly represented (→ 2-dimensional Newton) or b) one is implicitly represented and the other is parameterized (→ 1-dim. Newton). See the next section.
Intersection of two curves

Intersection of two curves: transversal cutting

Intersection of two curves: touching cutting or contact
Two continuously differentiable curves lying in the plane (ie curves without a “kink”) have an intersection point if they have a point in the plane in common and the two curves either at this point

- a) have different tangents ( transverse cutting ), or
- b) have common tangents and intersect at the point ( touching cutting , see picture).
If the two curves have a common point and a common tangent there, but do not cross, they touch at .

Since contact cutting rarely occurs and is mathematically very complex to deal with, transversal cutting is always assumed in the following . In order not to have to mention it again and again, the respective necessary differentiability conditions are also assumed. The determination of intersection points repeatedly leads to the problem of having to solve an equation with one or two equations with two unknowns. The equations are generally not linear and can then be solved numerically, for example using the 1- or 2-dimensional Newton method . The individual cases and the equations to be solved are described below:

Intersection: parameterized curve / implicit curve

Intersection: implicit curve / implicit curve
- If both curves are explicitly present: equating gives the equation


- If both curves parameterized available: .

- Equating gives two equations for two unknowns:

- If a curve parameterized and the other implicitly exist: .

- This is the simplest case after the explicit one. Because you only have to insert the parametric representation of into the equation of and you get the equation




- If both curves implicitly exist: .

- An intersection here is the solution of the generally non-linear system of equations

The starting values required for the respective Newton method can be obtained from a visualization of the two curves. A parameterized or explicitly given curve can be easily visualized because a point can be calculated for a given parameter or directly. For curves given implicitly this is not so easy. Here one generally has to calculate curve points with the help of starting points and an iteration process.

Examples:
- 1: and circle (see picture).


- It's the Newton iteration for

-
 perform. You can choose −1 and 1.5 as starting values.
perform. You can choose −1 and 1.5 as starting values.
- The intersections are: (−1.1073; −1.3578) and (1.6011; 4.1046)
- 2:

-
 (see picture).
(see picture).
- It's the Newton iteration
-
 perform, solving the linear system of equations
perform, solving the linear system of equations
-
 is in place . You can choose (−0.5; 1) and (1; −0.5) as starting points.
is in place . You can choose (−0.5; 1) and (1; −0.5) as starting points.
- The easiest way to solve the linear system of equations is with Cramer's rule .
- The intersection points are (−0.3686; 0.9953) and (0.9953; −0.3686).
Intersection of two polygons

Intersection of two polygons: window test
If you are looking for points of intersection of two polygons, you can examine each section of one polygon with each section of the other polygon for intersections (see above: intersection of two sections). This simple method is very time-consuming for polygons with many sections. So-called window tests can significantly reduce the computing time. Several sections are combined to form a sub-polygon and the associated window is calculated, which is the minimum axis-parallel rectangle that contains the sub-polygon. Before an intersection point of two partial polygons is laboriously calculated, the associated windows are tested for overlap.
Intersections in space
In 3-dimensional space one speaks of an intersection (common point) of a curve with a surface. In the following considerations (as above) only the transversal sections of a curve with a surface should be treated.
Intersection of a straight line with a plane
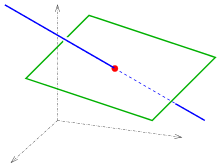
Intersection: straight line - plane
A straight line in space is usually described by a parametric representation and a plane by an equation . Inserting the parametric representation of the straight line into the plane equation results in the linear equation



for the parameter of the intersection . (If the linear equation has no solution, the straight line is parallel to the plane. If the equation is true for all , the straight line is contained in the plane.)


Intersection of three planes
If a straight line is the intersection of two non-parallel planes and is to be intersected with a third plane , the common point of the 3 planes must be determined.


Three planes with linearly independent normal vectors have the point of intersection



To prove this, convince yourself of observing the rules for a late product .

Intersections of a curve and a surface
As in the flat case, the following cases lead to generally non-linear systems of equations that can be solved with a 1 or 3-dimensional Newton method:
- parameterized curve and

- parameterized area

- parameterized curve and
- implicit area

Example:
- parameterized curve and

- implicit area (see picture)

- Equation to solve:

- The intersection points are: (−0.8587; 0.7374; −0.6332), (0.8587; 0.7374; 0.6332).
Note: A straight line can also be contained in a plane. Then there are an infinite number of points in common. A curve can also be partially or completely contained in a surface (see curves on the surface ). In these cases, however, one no longer speaks of an intersection .

See also
Individual evidence
-
↑ Descriptive Geometry for Architects (PDF; 1.5 MB). Script (Uni Darmstadt), pp. 35,73,74
-
↑ CDKG: Computer-assisted Descriptive and Constructive Geometry (TU Darmstadt) (PDF; 3.4 MB), p. 69
-
↑ CDKG: Computer-assisted Descriptive and Constructive Geometry (TU Darmstadt) (PDF; 3.4 MB), p. 79
-
↑ CDKG: Computer-assisted Descriptive and Constructive Geometry (TU Darmstadt) (PDF; 3.4 MB), p. 147.
Web links














