
Shock (physics)
A shock is a process in which two or more bodies briefly exert force on one another. As a result, the bodies change their state of motion, possibly also their shape and composition. In an inertial system , the law of conservation of momentum applies to all collisions - the sum of all momentum vectors remains constant. The energy conservation plays a role; But it does not only include mechanical forms of energy, as inelastic and reactive collisions show.
The fundamental laws of collision and their mathematical description were drawn up by Christiaan Huygens between 1651 and 1655 using the Galilean principle of relativity (see Galileo transformation ). Its empirical validity is essential for the concept of inertial mass .

Classification of mechanical impact processes
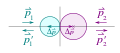
A tangential plane , which is referred to as the contact plane , can be created at the point of contact between the two bodies . The associated normal straight line forms the joint line. The masses of the two bodies are and their initial speeds and the maximum speeds and . Let the speed of the center of gravity of the two masses be . It remains constant before, during and after the impact.







A distinction is made between two ideal borderline cases, the elastic collision and the plastic collision (also inelastic or inelastic ). In the case of elastic collisions, kinetic energy is passed on from body to body, but remains overall as kinetic energy because they push away from each other. In the case of plastic impact, on the other hand, part of the kinetic energy is converted into internal energy and the bodies do not repel one another. That's why in the end both have the same speed. All intermediate stages are called real shock.
In the case of a straight impact , the two momentum vectors run parallel to the impact line, otherwise it is an oblique impact. If the common center of gravity of the two bodies lies on the line of impact, one speaks of a central impact, otherwise it is called an eccentric impact.
In addition, the smooth impact is differentiated from the uneven impact (also rough impact or friction impact ). In the case of a frictional impact, frictional forces occur on the contact surface and the momentum is no longer transmitted perpendicular to the contact plane. A vector decomposition into the tangential and normal components is suitable for further analysis - taking into account the rotational energy and the angular momentum .
- Classification
straight, central, elastic joint

ditto, the center of gravity moves across the direction of impact

eccentric shock

rough push




To simplify matters, it is assumed for the following calculations that the collision takes place in an infinitely short time and that the positions of the collision partners do not change during this time. The speeds of the collision partners change by leaps and bounds. Furthermore, the free mobility of the impact partner is assumed, so that only straight movements take place.
Elastic shock
In an ideally elastic or fully elastic collision, two bodies collide without energy being converted into internal energy, such as heat or deformation . After the conservation of energy , the sum is movement energy (= kinetic energy) before the collision as great as after the collision. The same applies to the momentum conservation law for the vectorial sum of the pulses.
For macroscopic objects, the ideal elastic collision is a model that cannot be achieved in reality. Kinetic energy is lost due to friction and similar influences. However, billiard balls or a rubber ball , for example, are very close to the model , as these generally do not undergo any plastic deformation.
With atoms and / or elementary particles, however, the ideal elastic collision is frequent. It is even the only possible process if the kinetic energy (in the center of gravity system ) is less than the minimum energy required for an internal excitation of one of the particles or a transformation of the particles (see also kinematics (particle impact) ).


The calculation of the elastic shock follows according to classical mechanics , i.e. That is, the speeds before and after the collision are far below the speed of light. According to the definition of "elastic", the sum of the kinetic energy before and after the collision must be the same:


At the same time, the vectorial law of conservation of momentum applies to all types of collisions :

The last line means that the vectorial pulse changes are oppositely equal. From this it follows that the changes in speed also have opposite directions, but their amounts depend on the mass ratio:

In the following, only the speed components in the direction of the momentum transfer are considered and referred to as. The orthogonal components of the initial impulses and velocities can be ignored because they do not change due to the impact. So the whole problem is reduced to the one-dimensional collision. The above equations (1) and (2) then become the following equations (1 ') and (2'), from which equation (3) is obtained by substituting:


According to equation (3), the mean velocity (along the direction of the momentum transfer) before and after the collision has the same value for both masses and :

If you multiply equation (3) by and add it to equation (2 '), the size drops out and you can solve for. This also gives the formula for from equation (2 ') or (3) . It results:




Each of the last two equations gives :


This is the speed of the common center of gravity (component in the direction of the momentum transfer).
For the special case :



For the special case (" is much smaller than ") and (e.g. "ball against wall"):


- and


Two-dimensional elastic collision

The two-dimensional elastic impact is based in principle on the one-dimensional elastic impact described above. First, the so-called central slope must be calculated. This describes the slope of the straight line through the centers of the spheres. The slope of the tangent through the point of contact of the balls is then calculated as follows:




If we decompose the motion vectors and then into two components parallel to the tangent and orthogonal thereto, it is possible to simplify the two-dimensional shock to a one-dimensional. The above formula then applies, but only for the components in the central direction.
![{\ displaystyle {\ vec {v}} _ {1} = [x_ {v_ {1}}, y_ {v_ {1}}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/27c240b21a44542d37feac29f9464a99196e5412)
![{\ displaystyle {\ vec {v}} _ {2} = [x_ {v_ {2}}, y_ {v_ {2}}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3d041e0bb0d8163dfa6a8f9d91978c9b16a09a69)
![{\ displaystyle {\ vec {v}} _ {t} = [x_ {t}, y_ {t}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b20957fe751c14b7082f53c9db7a2628c05d54ef)
![{\ displaystyle {\ vec {v}} _ {z} = [x_ {z}, y_ {z}] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a9721d2c86645b9e7409ffdcf0500fb3a9cdab87)
Therefore the vectors and have to be calculated first. This is done using the slopes , , and .




From here on, the indices 1 and 2 should be dispensed with in favor of a simpler representation.
From it follows:



For (the same applies to and ) the second equation can be simplified:




So we get the system of equations:
Forming gives:


For and are used accordingly.


Finally, the new vectors and must be calculated as indicated above. In the simplest case, namely with :




Otherwise the above formula must be used.
The new velocity vectors and are then calculated by vector addition of the vectors or and or :








Inelastic shock
With inelastic collisions (also called inelastic or plastic collisions ), part of the kinetic energy is converted into internal energy . The total internal energy (both bodies together) increases by the amount . In the simplest case, this happens through plastic deformation of the bodies involved. However, the energy can also be converted into frictional heat , for example in a shock absorber .


In the case of an ideally inelastic collision (also called completely inelastic or fully plastic collision), the maximum possible proportion of the kinetic energy is converted into internal energy, and the two masses "stick" to each other after the collision and continue to move at the same speed ( ). An example are two plasticine balls that stick together after being hit.






The following formulas describe a completely inelastic collision. Again, the two conservation laws apply:

- Before the push:

- After the shock:

The following can be derived from the law of conservation of momentum:

The internal energy can be calculated from the law of conservation of energy :

Real shock

A real collision between two masses always represents a mixture of ideally elastic and ideally plastic collisions, which is why it is also called partially elastic or partially plastic collision . The mixed form is represented by the impact number k, which is also called the restitution coefficient :

The number of impacts can also be determined using a drop test . Because of :


The following applies:
- : Completely plastic shock
- : Completely elastic collision


For a partially elastic collision with the number of collisions k , the following velocities result from conservation of momentum :


The deformation work = conversion of the kinetic energy can be determined from:

With the limit values 0 and 1 for the number of impacts, the equations of the velocities after the impact as well as the equation for the work of deformation can be simplified to the equations as they are in the sections on elastic and plastic impact.
Temporal progression for real bodies
When real bodies collide, the momentum is not transmitted instantaneously, but over a short period of time. According to Newton's second law ( ), the speed at which the momentum of a body changes is given by the force acting between the bodies. If e.g. If, for example, an elastic ball hits the ground, its deformation creates an upward force which first decelerates it until it momentarily reaches zero speed, and then accelerates upwards again until it detaches from the ground. The entire process corresponds to a power surge . Furthermore, Newton's third law actio = reactio applies :


with the force F and the time t.
During an impact, both impact partners experience an equally large impulse in opposite directions. One experiment to visualize the momentum transfer is the double ball experiment , in which spectacular kinetic energy is transferred from one impact partner to the other.
Super elastic shock
In a super-elastic collision, internal energy of at least one of the collision partners is converted into kinetic energy. The kinetic energy after this collision is greater than before the collision. The mathematical treatment is carried out as in general inelastic collision, just is .

Reactive shock
Reactive collisions lead to reactions such as B. chemical reactions , or for the creation of new particles through collisions of high-energy particles in elementary particle physics . It must be taken into account that different particles contribute to the energy and momentum before and after the collision. In addition to the speed, the masses and possibly the number of particles also change.
One type of reactive shock is e.g. B. charge exchange, an atomic physical process in which one or more electrons are exchanged between atoms , molecules or ions during a collision . It is very likely that the electrons will be transferred to the collision partner with the more positive charge. So z. B. positive ions contained in the solar wind (see also charged ion ) when passing through the thin gas atmosphere surrounding a comet capture electrons and thereby radiation, u. a. in the X-ray range , emit.
scattering
In particle physics , atomic physics , nuclear physics or when photons are involved, one also speaks of scattering . Here, too, inelastic scattering (inelastic collision) means that the kinetic energy is not retained as such, but in part, e.g. B. is converted into excitation energy or used to break bonds . When a photon is involved in inelastic scattering, its wavelength generally changes . For more details see scattering theory .
See also
literature
- Felix Hausdorff (Ed.), Christiaan Huygens: Christiaan Huygens' postponed treatises: About the movement of the body through the impact: About the centrifugal force. Academic Publishing Company, Leipzig around 1921.
Web links
- Elastic shock. The elastic collision in three dimensions including derivation using the conservation of momentum and energy.
- Video: Inelastic collision and conservation of momentum . Jakob Günter Lauth (SciFox) 2019, made available by the Technical Information Library (TIB), doi : 10.5446 / 40454 .
Individual evidence
- ↑ Karl-Eugen Kurrer : For the representation of the energy transformation in the case of a plane coupled friction impact with the help of the energy devaluation diagram . In: Cassius Alexandru, Günter Gödert, Uwe Görn, Roland Parchem, Joachim Villwock (eds.): Contributions to mechanics. Festschrift for the 65th birthday of Prof. Dr. Rudolf Trostel . University library of the TU Berlin, publication department, Berlin 1993, ISBN 3-7983-1581-7 , p. 148-169 .