This article deals with the
Lagrange function in terms of the Lagrange formalism in physics. For the
Lagrange function in mathematical optimization, see
Lagrange multiplier .
In physics, the Lagrange formalism is a formulation of classical mechanics introduced by Joseph-Louis Lagrange in 1788 , in which the dynamics of a system are described by a single scalar function, the Lagrange function . The formalism is (in contrast to Newtonian mechanics , which a priori only applies in inertial systems ) also valid in accelerated reference systems . The Lagrange formalism is invariant to coordinate transformations. The equations of motion can be determined from the Lagrange function with the Euler-Lagrange equations of the calculus of variations from the principle of the smallest effect . This approach simplifies many physical problems, since, in contrast to Newton's formulation of the laws of motion, constraints in the Lagrange formalism can be taken into account relatively easily by explicitly calculating the constraining forces or by appropriately choosing generalized coordinates . For this reason, the Lagrange formalism is widely used in multi-body systems (MBS). It can also be applied to the relativistic case and is also widely used in relativistic quantum field theory for the formulation of models of elementary particles and their interactions.
For systems with a generalized potential and holonomic constraints , the Lagrange function reads

where denotes the kinetic energy and the potential energy of the system under consideration. A distinction is made between so-called Lagrange equations of the first and second kind. In the narrower sense, the Lagrange formalism and the Lagrange equations are understood as the second kind , which are often simply referred to as Lagrange equations :



There are generalized coordinates and their time derivatives.


Lagrange equations of the first and second kind
The constraining forces can be calculated with the Lagrange equations of the first kind. They are equivalent to the equations that result from D'Alembert's principle . We consider point particles in the position vectors , whose coordinates by independent ( holonomic ) constraints of the mold with are limited (an explicit time dependence is allowed). This restricts the positions of the particles to a -dimensional manifold ( is the number of degrees of freedom ).









The constraining forces acting on a particle are proportional to the gradient , the total constraining force is therefore




If one assumes that the external forces can be derived from a potential, one can write the equation of motion (Lagrange equation 1st type):

They are the masses of the point particles, is the potential energy. These, together with the constraints , are independent equations for the coordinates of the as well as for the Lagrange multipliers . Thus the solution of the equation system is unique.





Note : Only holonomic constraints were dealt with here. However, the formalism can also be applied to constraints of the form , which z. B. with non-holonomic constraints between the velocities of the particles. In contrast to holonomic constraints, these constraint equations cannot be represented as a complete differential of a function, i.e. it does not apply between the coefficient functions .


In the case of holonomic constraints, new coordinates can be introduced that contain them implicitly, so-called generalized coordinates . With the kinetic energy

and potential forces

(which are also expressed by generalized coordinates and are then referred to as generalized forces - they do not necessarily have the dimension of a force) the equations of motion can also be written

or with the Lagrange function (Lagrange equation 2nd type):

If, as in this case, forces that can only be derived from a potential (potential forces) occur, one speaks of conservative forces .
Note : Sometimes the generalized forces can be written in the following form using
a speed-dependent generalized potential 

Then the equations of motion also result
-
 ,
,
with the Lagrange function :


The system is then no longer conservative in the usual sense . One example is the electromagnetic field (see below).
But sometimes you still have non-conservative powers , so that the equations are written:


An example are systems with non-holonomic constraints (see above) or frictional forces.
Derivation from the Hamilton principle
The Lagrange equations of the second kind result as so-called Euler-Lagrange equations of a variation problem and provide the equations of motion if the Lagrange function is given. They follow from the variation of the action integral formed with the Lagrange function in Hamilton's principle . To do this, one considers all possible trajectories in the space of generalized coordinates between fixed starting and end points. One considers the change in the action integral when the trajectories vary



The Hamilton principle states that for the classical orbit the action integral is stationary with variation of the orbit curves:

A first order approximation is for an ordinary function 

so
-
 .
.
In the first order the variation of the integral results in
-
 .
.
Now one carries out a partial integration in the term that contains the derivative with respect to time:
-
![\ int_ {t_1} ^ {t_2} \ text {d} t \ left (\ frac {\ partial L} {\ partial \ dot q} \ frac {\ text {d}} {\ text {d} t} \ delta q \ right) = \ left [\ frac {\ partial L} {\ partial \ dot q} \ delta q \ right] _ {t_1} ^ {t_2} - \ int_ {t_1} ^ {t_2} \ text { d} t \ left (\ delta q \ frac {\ text {d}} {\ text {d} t} \ frac {\ partial L} {\ partial \ dot q} \ right)](https://wikimedia.org/api/rest_v1/media/math/render/svg/c08646c8e3ec8d8caace73146825e6ae475ad967) .
.
It is used here that

is because the start and end points are recorded. Therefore applies to the boundary terms
![\ left [\ frac {\ partial L} {\ partial \ dot q} \ delta q \ right] _ {t_1} ^ {t_2} = 0](https://wikimedia.org/api/rest_v1/media/math/render/svg/f55e9556569f9eacf844f688a12f53152db63f65)
This ultimately results

Since now occurs as a factor of the entire integral and is arbitrary, the integral can only vanish according to the principle of variation if the integrand itself vanishes. The following are the Lagrange equations or Lagrange equations of the second kind (the Euler-Lagrange equations of the variation problem considered here):

There is such an equation for every generalized coordinate (and the associated generalized velocity ). The Lagrange equations form a system of ordinary second order differential equations with respect to the time derivative. How many differential equations there are in the end is only known when the number of degrees of freedom of the "system" has been calculated.
Cyclic variables and symmetry
If the Lagrange function does not depend on a coordinate , but only on the associated speed , then it is called cyclic , cyclic coordinate or cyclic variable . The impulse conjugated to the cyclic variable


is a conservation quantity: its value does not change during movement, as will be shown shortly. If the Lagrange function does not depend on, then holds

But then it follows from the Euler-Lagrange equation that the time derivative of the associated conjugate momentum vanishes and it is therefore constant over time:

More generally, according to Noether's theorem , every continuous symmetry of the effect has a conservation quantity . With a cyclic variable, the effect is invariant under the shift of by any constant,
Extension to fields
In field theory , the equation of motion results from the Hamiltonian principle for fields to

where are the considered field and the Lagrange density .


You can also write this in short as

with the derivative of variation defined in this way .

Note: The Lagrange formalism is also the starting point for many formulations of quantum field theory .
Relativistic Mechanics
In relativistic mechanics, the Lagrange function of a free particle can be derived from Hamilton's principle by assuming the simplest case of a relativistic scalar for the effect:

where the relativistic line element is proportional to proper time and a constant factor was chosen.


The Lagrange function of a free particle is no longer identical with the kinetic energy (this is why one sometimes speaks of the kinetic supplementary energy T in the Lagrange function). The relativistic kinetic energy of a body with mass and speed without constraints is



while for the Lagrange function the kinetic supplementary energy

is relevant. The Lagrange function for a particle in a potential V is then given by

For a particle system is the Lagrange function with the generalized coordinates

where is the number of degrees of freedom and the number of holonomic constraints.

For small velocities one can develop the root up to the first order :



The zeroth order of development is a constant, the negative rest energy. Since the Lagrange equations are invariant when a constant is added to the Lagrange function, the constant first term can be omitted and the classical kinetic energy is obtained again:


Connection with path integrals in quantum mechanics
Richard Feynman was the first to use this approach consistently for the derivation of the equations of quantum mechanics . In classical physics, the Lagrange equations described above result from the requirement that the action integral is stationary. In Feynman's path integral formalism, the quantum mechanical probability amplitude that a system will follow a certain path between the initial and final conditions is proportional to the action integral . Paths in the vicinity of the classic path, for which the variation of vanishes, usually provide the main contributions, since the contributions with almost the same phase factors add up in their vicinity.


Examples
Mass in harmonic potential (conservative)
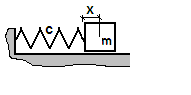
Oscillation system:
x is the deflection from the equilibrium position
A mass is connected via two springs with a spring constant and fixed boundary conditions. The basic requirement for describing the problem in the Lagrange formalism is the setting up of the Lagrange function by setting up the terms for kinetic energy and potential energy :



The Lagrange function is therefore:

The Lagrange function in turn is inserted into the Euler-Lagrange equation for the analytical description of the physical problem, which then leads to equations that correspond to the equations of motion in Newtonian mechanics. In this example, the generalized coordinate is the Euler-Lagrange equation
-
 .
.
This leads to the above formulas for on

and thus to the equation of motion of the system:
-
 .
.
The general solution of this differential equation is , is the time when the angular frequency . The constant amplitude and phase can be determined from the initial conditions.





Charge in the electromagnetic field (non-conservative)
A point charge with mass moves in the electromagnetic field. The generalized coordinates correspond to the Cartesian coordinates in 3 spatial dimensions.
The fields (magnetic field and electric field ) are determined by the scalar potential and the vector potential :





The kinetic energy of the particle is classic:

The "potential" here is, however, dependent on the speed, which is why one speaks of a generalized potential as shown above :

Thus, the Lagrange function of a charged particle in the electromagnetic field is:

The Euler-Lagrange equations lead to the equation of motion, on the right-hand side of which the Lorentz force is:


Mass on drum (non-conservative)
The axis of an elevator drum is driven by a torque . The mass of the load is the mass moment of inertia of the drum . The radius of the drum is .



The following relationship exists between the coordinates and :



The kinetic energy is:

The virtual work of the impressed forces is


The equation of motion finally follows from this

The solution of this equation for the angular acceleration gives

Atwood's fall machine (method of the first kind)

Functional diagram of the fall machine
In Atwood's fall machine, one considers two point masses in the earth's gravitational field, which are suspended from a pulley at height h and connected by a rope of length l . The constraint in this case is:

If the rope lying on the pulley (pulley radius r) is taken into account, the following results:

The potential energy V is calculated as follows:

For the gradients one obtains


This leads to the system of Lagrange equations of the first type:

This can be resolved and z. B. for known initial conditions:

Particle in free fall (general relativity)
In the general theory of relativity , free-falling particles traverse world lines for a long time: between two (sufficiently close) events and on a clock carried along the world line of free-falling particles, more time passes than on all other world lines through these events. Is an increasing monotonically along the path running parameters, then the elapsed time is calculated to


with the Lagrange function

Here are the component functions of the metric (both space and time components ). For the sake of simplicity, we calculate in systems of measurement in which the speed of light is dimensionless and has the value , and we use Einstein's sum convention .


The momentum to be conjugated is


and the Euler-Lagrange equations are


Let's use the Christoffel symbol as an abbreviation

so the world line of the longest duration turns out to be a straight line: the direction of the tangent to the world line

does not change with parallel displacement along the world line

The parameterization is not specified. If we have them in such a way that the tangential vector is of the same length everywhere, then it is constant and the tangential vector turns into itself when it passes through the world line. It satisfies the geodesic equation


This is the general relativistic form of the equation of motion of a free falling particle. The gravitation is fully taken into account.

literature
The Lagrange formalism is dealt with in many introductory and advanced textbooks on classical mechanics.
- Josef Honerkamp, Hartmann Römer : Classical Theoretical Physics . 3. Edition. Springer, 1993, ISBN 3-540-55901-9 . (Full text available here )
-
Herbert Goldstein , Charles P. Poole, John L. Safko: Classical Mechanics . 3. Edition. Wiley-VCH, 2006, ISBN 3-527-40589-5 .
-
Cornelius Lanczos : The Variational Principles of Mechanics . 4th edition. Dover Publ. Inc, 1986, ISBN 0-486-65067-7 .
- Friedhelm Kuypers: Classic mechanics . 8th edition. Wiley-Vch, 2008, ISBN 3-527-40721-9 .
Literature on path integrals.
Web links
Individual evidence
-
↑ Landau , Lifschitz : Textbook of theoretical physics I - Mechanics. Akademie-Verlag Berlin 1987, p. 156.
-
↑ For example Hamel Theoretische Mechanik , Springer Verlag 1967, p. 281.
-
↑ The real anholonomic constraints would be The time differential vanishes by definition with the associated so-called virtual shifts



-
↑ See the calculus of variations . There the Euler-Lagrange equations result from the variation of a functional. In mechanics, the functional under consideration is the action function and one speaks of the Lagrange equation.




{kind=link}