
Sphere (top, ),
ellipsoid of revolution (bottom left, ), triaxial ellipsoid (bottom right, )


An ellipsoid is the 3-dimensional equivalent of an ellipse . Just as an ellipse can be understood as an affine image of the unit circle , the following applies:
- An ellipsoid (as a surface ) is an affine image of the unit sphere

The simplest affine mappings are the scales of the Cartesian coordinates . They provide ellipsoids with equations

Such an ellipsoid is point symmetrical to the point , the center of the ellipsoid. Analogous to an ellipse, the numbers are the semi-axes of the ellipsoid and the points are its 6 vertices .


- If is, the ellipsoid is a sphere .

- If exactly two semi-axes coincide, the ellipsoid is an ellipsoid of revolution .
- If the 3 semi-axes are all different, the ellipsoid is called triaxial or triaxial .
All ellipsoids are symmetrical about each of the three coordinate planes. With the ellipsoid of revolution, there is also the rotational symmetry with respect to the axis of rotation . A sphere is symmetrical about any plane through the center point.


Jupiter's diameter from pole to pole is significantly smaller than at the equator (red circle for comparison)
Approximate examples of ellipsoids of revolution are the rugby ball and flattened rotating celestial bodies , such as the earth or other planets ( Jupiter ), suns or galaxies . Elliptical galaxies and dwarf planets (e.g. (136108) Haumea ) can also be triaxial.
In linear optimization , ellipsoids are used in the ellipsoid method .
Parametric representation
The points on the unit sphere can be parameterized as follows (see spherical coordinates ):

For the angle (measured from the z-axis) applies . For the angle (measured from the x-axis) applies .




Scaling the individual coordinates with the factors results in a parametric representation of the ellipsoid :

with and
volume
The volume of the ellipsoid is

A sphere with a radius has the volume

- Derivation
The intersection of the ellipsoid with a plane in height is the ellipse with the semiaxes


-
 .
.
The area of this ellipse is . The volume then results from


surface
Surface of an ellipsoid of revolution
The surface of an oblate ellipsoid of revolution with is



that of the elongated ellipsoid ( )


A sphere with a radius has the surface .

Surface of a triaxial ellipsoid
The surface of a triaxial ellipsoid cannot be expressed in terms of functions that are considered to be elementary , such as: B. or above at the ellipsoid of revolution . Adrien-Marie Legendre succeeded in calculating the area with the help of the elliptical integrals . Be . You write



-
 and
and 
these are the integrals
-
 and
and 
With and after Legendre, the surface has value



Are the expressions for and as well as the substitutions
-
 and
and 
inserted into the equation for , the notation results


The integral-free approximation formula comes from Knud Thomsen

The maximum deviation from the exact result is less than 1.2%.
In the limiting case of a fully flattened ellipsoid all three specified aim formulas for up to twice the surface area of an ellipse with semi-axes and .




Application example for the formulas
The planet Jupiter is significantly flatter at the poles than at the equator due to the centrifugal forces acting due to the rapid rotation and have approximately the shape of an ellipsoid of revolution .
Jupiter has an equatorial diameter of 142,984 km and a pole diameter of 133,708 km. So for the semi-axes and . The mass of Jupiter is about 1.899 · 10 27 kg. Using the above formulas for volume , mean density and surface, this results in :


-
Volume :

- That is about 1,321 times the volume of the earth.
-
Medium density :

- Overall, Jupiter has a slightly higher density than water under standard conditions .
-
Surface :

- That's about 121 times the surface of the earth.
Plane cuts
properties
Planar section of an ellipsoid
The intersection of an ellipsoid with a plane is
The first case follows from the fact that a plane intersects a sphere in a circle and a circle turns into an ellipse in an affine mapping . In the case of an ellipsoid of revolution , it is obvious that some of the ellipses of intersection are circles : All plane sections that contain at least 2 points and whose planes are perpendicular to the axis of rotation are circles. However, it is not obvious that every 3-axis ellipsoid contains many circles and is explained in the circular section plane.
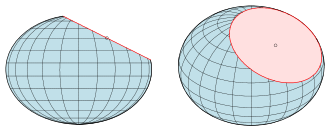
The true outline of any ellipsoid is a plane section, i.e. an ellipse (see pictures) , in both parallel and central projection.
Determination of a cut ellipse

Planar section of an ellipsoid
Given: Ellipsoid and a plane with the equation that the ellipsoid intersects in an ellipse. Wanted: Three vectors ( center point ) and (conjugate vectors) such that the intersection ellipse through the parametric representation




can be described (see ellipse ).
Solution: The scaling converts the ellipsoid into the unit sphere and the given plane into the plane with the equation . The Hesse normal form the new layer is the unit normal vector Then, the center of the circle of intersection and its radius If is is (the plane is horizontal!) If is, whether the vectors are located in each case, two in the sectional plane orthogonal vectors of length (Circle radius), d. This means that the intersection circle is described by the parametric representation .














If the above scaling ( affine mapping ) is reversed, the unit sphere becomes the given ellipsoid again and the vectors sought are obtained from the vectors with which the intersecting ellipse can be described. How to determine the vertices of the ellipse and thus its semiaxes is explained under Ellipse .


Example: The images belong to the example with and the cutting plane. The image of the ellipsoidal section is a perpendicular parallel projection onto a plane parallel to the cutting plane, i. That is, the ellipse appears in its true shape except for a uniform scale. Note that , in contrast to, it is not perpendicular to the cutting plane. In contrast to, the vectors here are not orthogonal .




Thread construction

Thread construction of an
ellipse Length of the fade (red)


Thread construction of an ellipsoid

Thread construction: determination of the semi-axes
The thread construction of an ellipsoid is a transfer of the idea of the gardener construction of an ellipse (see illustration). A thread construction of an ellipsoid of revolution results from construction of the meridian ellipses with the help of a thread.
Constructing points of a 3-axis ellipsoid using a stretched thread is a bit more complicated. Wolfgang Boehm attributes the basic idea of the thread construction of an ellipsoid to the Scottish physicist James Clerk Maxwell (1868) in the article The thread construction of the second order surfaces . Otto Staude then generalized the thread construction to quadrics in works 1882, 1886 and 1898 . The thread construction for ellipsoids and hyperboloids is also described in the book Illustrative Geometry by David Hilbert and Stefan Cohn-Vossen . Even Sebastian Finsterwalder dealt with this issue in 1886.
- Construction steps
-
(1) Choose an ellipse and a hyperbola that form a pair of focal conic sections :
- Ellipse: and

- Hyperbole:

- with the vertices and foci of the ellipse

- and a thread (red in the picture) the length .

-
(2) Attach one end of the thread to the vertex and the other end to the focal point . The thread is kept taut at one point so that the thread can slide from behind on the hyperbola and from the front on the ellipse (see illustration). The thread goes over that hyperbola point with which the distance from to above a hyperbola point is minimal. The same applies to the thread part from to over an ellipse point.



-
(3) If the point is chosen so that it has positive y and z coordinates , then a point is on the ellipsoid with the equation
-
 and
and

-
(4) The remaining points of the ellipsoid are obtained by appropriately stretching the thread around the focal conic sections .
The equations for the semi-axes of the generated ellipsoid result if the point is dropped into the two vertices :

From the drawing below you can see that the focal points are also the equator ellipse. That means: The equator ellipse is confocal to the given focal ellipse. So is what follows. You can also see that is. The above drawing shows: are the focal points of the ellipse in the xz plane and it applies .






Conversation:
If you want to construct a 3-axis ellipsoid given by your equation with the semiaxes , you can use the equations in step (3) to calculate the parameters necessary for the thread construction . The equations are important for the following considerations


-
(5)

Confocal Ellipsoids:
Is a too confocal ellipsoid with the squares of the semi-axes

-
(6)

so one can see from the previous equations that the associated focal conic sections for thread generation have the same semi-axes as those of . Therefore - analogous to the role of the focal points in the creation of a thread in an ellipse - the focal conic sections of a 3-axis ellipsoid are understood as their infinitely many focal points and they are called focal curves of the ellipsoid.
The reverse is also correct: If you choose a second thread of length and set , then the following applies : The two ellipsoids are confocal.



Limiting case of revolution:
the case is , d. That is, the focal ellipse degenerates into a segment and the hyperbola into two rays on the x-axis. The ellipsoid is then an ellipsoid of revolution with the x-axis as the axis of rotation . It is .



Properties of the focal hyperbola:
If you look at an ellipsoid from an external point on the associated focal hyperbola, the outline of the ellipsoid appears as a circle . Or, in other words: the tangents of the ellipsoid through form a perpendicular circular cone , the axis of rotation of which is tangent to the hyperbola . If you let the eye point run into infinity, the view of a vertical parallel projection arises with an asymptote of the focal hyperbola as the projection direction. The true outline curve on the ellipsoid is generally not a circle. The figure shows a parallel projection of a 3-axis ellipsoid (semiaxes: 60,40,30) in the direction of an asymptote at the bottom left and a central projection with the center on the focal hyperbola and the main point on the tangent to the hyperbola in . In both projections the apparent outlines are circles. On the left the image of the coordinate origin is the center of the outline circle, on the right the main point is the center.



The focal hyperbola of an ellipsoid cuts the ellipsoid at its four umbilical points .
Property of the focal ellipse:
The interior of the focal ellipse can be viewed as the boundary surface of the confocal ellipsoids determined by a set of confocal ellipsoids as an infinitely thin ellipsoid. It is then


Ellipsoid in any position
Parametric representation
An affine mapping can be described by a parallel shift by and a regular 3 × 3 matrix :
-
 ,
,
where are the column vectors of the matrix .

The parametric representation of any ellipsoid results from the above parametric representation of the unit sphere and the description of an affine mapping:

The reverse applies: If you choose any vector and any vectors , but linearly independent , the above parametric representation always describes an ellipsoid. If the vectors form an orthogonal system , the points are the vertices of the ellipsoid and the associated semiaxes.


A normal vector in the point is


An implicit description can also be given for a parametric representation of any ellipsoid . For an ellipsoid with a center at the coordinate origin , i. H. , is



an implicit representation.
Note: The ellipsoid described by the above parametric representation is the unit sphere in the possibly inclined coordinate system ( coordinate origin ), (base vectors ) .
Ellipsoid as a quadric
Any ellipsoid with a center can be used as the solution set of an equation

write, where is a positive definite matrix .
The eigenvectors of the matrix define the principal axes of the ellipsoid and the eigenvalues of are the reciprocals of the squares of the semi-axes: , and .



Ellipsoid in projective geometry
If the 3-dimensional affine space and the individual quadrics are projectively closed by a far plane or far points, then the following quadrics are projectively equivalent, i.e. In other words , there is always a projective collineation that translates one quadric into the other:
See also
Web links
Individual evidence
-
^ Adrien-Marie Legendre: Traite des fonctions elliptiques et des intégrales Euleriennes , vol. 1. Hugard-Courier, Paris 1825, p. 357.
-
↑ Suzanne M. Kresta, Arthur W. Etchells III, David S. Dickey, Victor A. Atiemo-Obeng (Eds.): Advances in Industrial Mixing: A Companion to the Handbook of Industrial Mixing. John Wiley & Sons, March 11, 2016, ISBN 978-0-470-52382-7 , page 524 at the bottom of Google Book Search.
-
↑ W. Böhm: The thread construction of the surfaces of the second order , Mathemat. Nachrichten 13, 1955, p. 151.
-
↑ O. Staude: About yarn constructions of the ellipsoid. Math. Ann. 20, 147-184 (1882).
-
^ O. Staude: About new focal properties of the surfaces of the 2nd degree. Math. Ann. 27: 253-271 (1886).
-
↑ O. Staude: The algebraic basics of the focal properties of surfaces of the 2nd order. Math. Ann. 50, 398-428 (1898).
-
^ D. Hilbert & S. Cohn-Vossen: Illustrative Geometry. Springer-Verlag, 2013, ISBN 3662366851 , p. 18.
-
↑ S. Finsterwalder: About the thread construction of the ellipsoid. Mathematische Annalen Vol. 26, 1886, pp. 546-556.
-
↑ O. Hesse: Analytical Geometry of Space. Teubner, Leipzig 1861, p. 287.
-
↑ D. Hilbert, S. Cohn-Vossen: Illustrative Geometry. P. 22.
-
↑ O. Hesse: Analytical Geometry of Space. P. 301.
-
↑ W. Blaschke: Analytical Geometry. P. 125.
-
↑ Computer- Aided Descriptive and Constructive Geometry. Darmstadt University (PDF; 3.4 MB), p. 88.
-
^ Symmetric matrices, quadratic forms, matrix norm, and SVD.












